简介
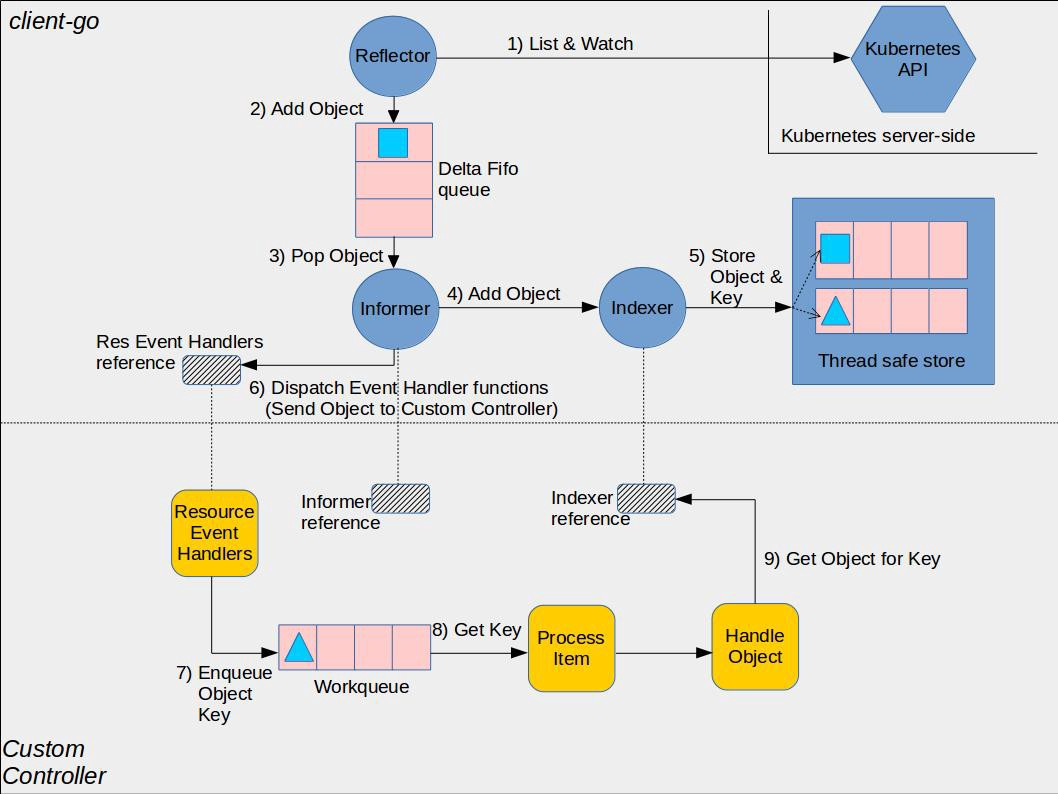
client-go 架构图
本章可以在listwatch的基础上加入reflector, 并且把得到的值写入到第一章的deltafifo中,从而研究一把reflector。
demo
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
|
func main() {
//create config
config, err := clientcmd.BuildConfigFromFlags("", clientcmd.RecommendedHomeFile)
if err != nil {
panic(err)
}
//create client
clientset, err := kubernetes.NewForConfig(config)
if err != nil {
panic(err)
}
df := cache.NewDeltaFIFOWithOptions(cache.DeltaFIFOOptions{KeyFunction: cache.MetaNamespaceKeyFunc})
podLW := cache.NewListWatchFromClient(clientset.CoreV1().RESTClient(), "pods", "default", fields.Everything())
rf := cache.NewReflector(podLW, &v1.Pod{}, df, 0)
ch := make(chan struct{})
go func() {
rf.Run(ch)
}()
for {
df.Pop(func(obj interface{}) error {
for _, delta := range obj.(cache.Deltas) {
fmt.Println(delta.Type, ":", delta.Object.(*v1.Pod).Name, ":", delta.Object.(*v1.Pod).Status.Phase)
}
return nil
})
}
}
|
demo 解释
这一章中的大部分代码和前两章是一样的,区别是
1
2
3
4
5
|
rf := cache.NewReflector(podLW, &v1.Pod{}, df, 0)
ch := make(chan struct{})
go func() {
rf.Run(ch)
}()
|
rf := cache.NewReflector(podLW, &v1.Pod{}, df, 0):
podLW 是一个 ListWatch 接口,用于指定要监听的 Kubernetes 资源的类型和条件。在这里,它监听的是 Pod 资源,通过 podLW 来指定 Pod 的列表和 Watch 的条件。
&v1.Pod{} 表示监听的资源对象的类型。在这里是 Pod 资源,&v1.Pod{} 是 Pod 资源对象的一个空实例,用于指定资源的类型和 API 版本。
df 是 DeltaFIFO 的实例,它是一个队列,用于存储资源对象的增、删、改的 Delta 操作。
0 表示 ResyncPeriod,即重新同步的时间间隔,这里设置为 0 表示不进行定期重新同步,完全依赖于监听到的资源变更事件。
rf 是创建的 Reflector 实例,它将监听 Kubernetes API Server 上的 Pod 资源变更,并将这些变更转换成 Delta 操作存储到 DeltaFIFO 中。
ch := make(chan struct{}):
ch 是一个空结构体类型的通道,用于通知 Reflector 停止运行。通常,通过向这个通道发送信号来触发 Reflector 的停止操作。
go func() { rf.Run(ch) }():
启动了一个新的 goroutine,其中运行了 rf.Run(ch)。
rf.Run(ch) 是 Reflector 的方法,它会开始监听资源的变更,并将这些变更转换成 Delta 操作存储到 DeltaFIFO 中。通过传递 ch 这个通道,可以随时通知 Reflector 停止运行。
这样的设计是为了使 Reflector 在后台异步运行,不阻塞主程序的执行。
功能测试
把上一张中的yaml导入我们可以看到
1
2
3
4
5
6
|
Sync : test-pod2 : Running
Added : test-pod : Pending
Updated : test-pod : Pending
Updated : test-pod : Pending
Updated : test-pod : Pending
Updated : test-pod : Running
|
删除这个pod我们可以看到
1
2
3
|
Updated : test-pod : Succeeded
Updated : test-pod : Succeeded
Updated : test-pod : Succeeded
|
此处会有一个问题,就是为什么没有delete事件?
delete事件的处理
原因是在架构图中的有一个index, 这个index就是在第一章deltafifo中曾经提到过的另一个参数KnownObjects。
修改后的代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
|
func main() {
//create config
config, err := clientcmd.BuildConfigFromFlags("", clientcmd.RecommendedHomeFile)
if err != nil {
panic(err)
}
//create client
clientset, err := kubernetes.NewForConfig(config)
if err != nil {
panic(err)
}
store := cache.NewStore(cache.MetaNamespaceKeyFunc)
df := cache.NewDeltaFIFOWithOptions(cache.DeltaFIFOOptions{KeyFunction: cache.MetaNamespaceKeyFunc, KnownObjects: store})
podLW := cache.NewListWatchFromClient(clientset.CoreV1().RESTClient(), "pods", "default", fields.Everything())
rf := cache.NewReflector(podLW, &v1.Pod{}, df, 0)
ch := make(chan struct{})
go func() {
rf.Run(ch)
}()
for {
df.Pop(func(obj interface{}) error {
for _, delta := range obj.(cache.Deltas) {
fmt.Println(delta.Type, ":", delta.Object.(*v1.Pod).Name, ":", delta.Object.(*v1.Pod).Status.Phase)
switch delta.Type {
case cache.Sync, cache.Added:
store.Add(delta.Object)
case cache.Updated:
store.Update(delta.Object)
case cache.Deleted:
store.Delete(delta.Object)
}
}
return nil
})
}
}
|
delete事件消失的解释
根据源码注释中的解释,这个故事我猜想是这样的。
-
- 如果在一开始我们设置了index, 那么Deltafifo就会自动实现读写分离,也就是说Deltafifo只会负责写,而index是给我们读的。
-
- Deltafifo会在Replace和Resync的时候把自己的数据同步给index, 这两种情况的区别在与有没有错误事件的产生。没错就Resync,有错就replace。
-
- 由于Deltafifo和index之间是同步的关系,那么我们就可以将一些操作合并。那么,最烧脑的问题来了,过一个对象的多个操作,什么操作可以合并?
-
- 对于更新这种类型的操作在没有全量基础的情况下是没法合并的,同时我们还不知道具体是什么类型的对象,所以能合并的也就是添加/删除,并且,两个添加/删除操作其实可以视为一个
关于删除操作的源码解释
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
|
// 代码源自client-go/tools/cache/delta_fifo.go
func dedupDeltas(deltas Deltas) Deltas {
// 小于2个delta,那就是1个呗,没啥好合并的
n := len(deltas)
if n < 2 {
return deltas
}
// 取出最后两个
a := &deltas[n-1]
b := &deltas[n-2]
// 判断如果是重复的,那就删除这两个delta把合并后的追加到Deltas数组尾部
if out := isDup(a, b); out != nil {
d := append(Deltas{}, deltas[:n-2]...)
return append(d, *out)
}
return deltas
}
// 判断两个Delta是否是重复的
func isDup(a, b *Delta) *Delta {
// 只有一个判断,只能判断是否为删除类操作,和我们上面的判断相同
// 这个函数的本意应该还可以判断多种类型的重复,当前来看只能有删除这一种能够合并
if out := isDeletionDup(a, b); out != nil {
return out
}
return nil
}
// 判断是否为删除类的重复
func isDeletionDup(a, b *Delta) *Delta {
// 二者都是删除那肯定有一个是重复的
if b.Type != Deleted || a.Type != Deleted {
return nil
}
// 理论上返回最后一个比较好,但是对象已经不再系统监控范围,前一个删除状态是好的
if _, ok := b.Object.(DeletedFinalStateUnknown); ok {
return a
}
return b
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
|
// 代码源自client-go/tools/cache/delta_fifo.go
func (f *DeltaFIFO) Replace(list []interface{}, resourceVersion string) error {
f.lock.Lock()
defer f.lock.Unlock()
keys := make(sets.String, len(list))
// 遍历所有的输入目标
for _, item := range list {
// 计算目标键
key, err := f.KeyOf(item)
if err != nil {
return KeyError{item, err}
}
// 记录处理过的目标键,采用set存储,是为了后续快速查找
keys.Insert(key)
// 因为输入是目标全量,所以每个目标相当于重新同步了一次
if err := f.queueActionLocked(Sync, item); err != nil {
return fmt.Errorf("couldn't enqueue object: %v", err)
}
}
// 如果没有存储的话,自己存储的就是所有的老对象,目的要看看那些老对象不在全量集合中,那么就是删除的对象了
if f.knownObjects == nil {
// 遍历所有的元素
for k, oldItem := range f.items {
// 这个目标在输入的对象中存在就可以忽略
if keys.Has(k) {
continue
}
// 输入对象中没有,说明对象已经被删除了。
var deletedObj interface{}
if n := oldItem.Newest(); n != nil {
deletedObj = n.Object
}
// 终于看到哪里用到DeletedFinalStateUnknown了,队列中存储对象的Deltas数组中
// 可能已经存在Delete了,避免重复,采用DeletedFinalStateUnknown这种类型
if err := f.queueActionLocked(Deleted, DeletedFinalStateUnknown{k, deletedObj}); err != nil {
return err
}
}
// 如果populated还没有设置,说明是第一次并且还没有任何修改操作执行过
if !f.populated {
f.populated = true
f.initialPopulationCount = len(list) // 记录第一次通过来的对象数量
}
return nil
}
// 下面处理的就是检测某些目标删除但是Delta没有在队列中
// 从存储中获取所有对象键
knownKeys := f.knownObjects.ListKeys()
queuedDeletions := 0
for _, k := range knownKeys {
// 对象还存在那就忽略
if keys.Has(k) {
continue
}
// 获取对象
deletedObj, exists, err := f.knownObjects.GetByKey(k)
if err != nil {
deletedObj = nil
glog.Errorf("Unexpected error %v during lookup of key %v, placing DeleteFinalStateUnknown marker without object", err, k)
} else if !exists {
deletedObj = nil
glog.Infof("Key %v does not exist in known objects store, placing DeleteFinalStateUnknown marker without object", k)
}
// 累积删除的对象数量
queuedDeletions++
// 把对象删除的Delta放入队列
if err := f.queueActionLocked(Deleted, DeletedFinalStateUnknown{k, deletedObj}); err != nil {
return err
}
}
// 和上面的代码差不多,只是计算initialPopulationCount值的时候增加了删除对象的数量
if !f.populated {
f.populated = true
f.initialPopulationCount = len(list) + queuedDeletions
}
return nil
}
|
从Replace()的实现来看,主要用于实现对象的全量更新。这个可以理解为DeltaFIFO在必要的时刻做一次全量更新,这个时刻可以是定期的,也可以是事件触发的。由于DeltaFIFO对外输出的就是所有目标的增量变化,所以每次全量更新都要判断对象是否已经删除,因为在全量更新前可能没有收到目标删除的请求。这一点与cache不同,cache的Replace()相当于重建,因为cache就是对象全量的一种内存映射,所以Replace()就等于重建。
那我来问题一个非常有水平的问题,为什么knownObjects为nil时需要对比队列和对象全量来判断对象是否删除,而knownObjects不为空的时候就不需要了?
我们前面说过,knownObjects就是Indexer(具体实现是cache),而开篇的那副图已经非常明确的描述了二者以及使用之间的关系。也就是说knownObjects有的对象就是使用者知道的所有对象,此时即便队列(DeltaFIFO)中有相应的对象,在更新的全量对象中又被删除了,那就没必要通知使用者对象删除了,这种情况可以假想为系统短时间添加并删除了对象,对使用者来说等同于没有这个对象。
 Zehao Liu
Zehao Liu 支付宝
支付宝
 微信
微信